Sensor “uORB” Drivers
NuttX, in order to uniformly manage all sensors, reuse common code, and reduce space occupation, extracts the common parts of all sensor drivers into an upper half layer that provides general functionalities. The lower half layer is responsible for the actual interaction with sensor registers.
NuttX sensor drivers focus more on physical sensors. For virtually fused sensors generated through integration, they are automatically created through application advertisements or subscriptions. For devices like IMUs, which integrate multiple sensors into one unit, multiple lower halves need to be instantiated within the driver, and device nodes are registered separately through the API (sensor_register) provided by the upper half.
Note
When writing a uORB driver for GNSS/GPS devices, please use the GNSS lower-half driver. This driver abstracts parsing and advertising of NMEA information.
Naming
The name used for this component in NuttX may be misleading because this sensor framework is not dependent on “uORB” in any way. Sensors implemented in this way can be used as general character drivers with a standardized interface.
Driver Model
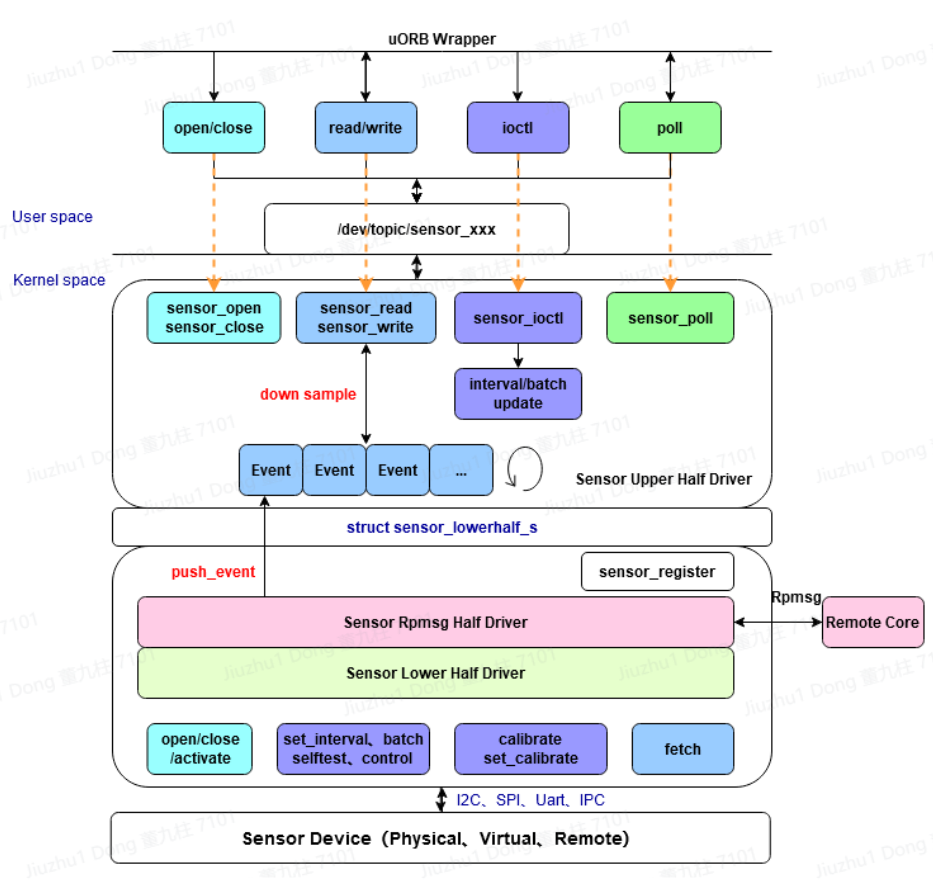
The NuttX Sensor Upperhalf Driver is primarily responsible for registering device
nodes, implementing the struct file_operations, multi-user access, ring buffer
management, low power consumption, and downsampling logic. The Lowerhalf Driver
is divided into rpmsg half and a general lower half. The rpmsg half is responsible
for cross-core subscription and publication with remote CPUs, while the general
lower half is responsible for interacting with sensor hardware. The main actions
performed by the general lower half include a set of sensor operations such as
activate, set_interval, batch, selftest, set_calibvalue,
calibrate, and control. Under interrupt or polling mechanisms,
sensor events are sent to the ring buffer in the upper layer.
Sensor data type
The framework supports two types of sensor data:
floatifCONFIG_SENSORS_USE_FLOAT=y, not recommended for targets without FPU.b16_tifCONFIG_SENSORS_USE_B16=y, recommended for targets without FPU.
Currently all sensors support float, support for b16_t is work-in-progress.
Warning
Using fixed-point math instead of floating point may cause sensors measurements to saturate where they wouldn’t before. Verify that fixed-point data types are sufficient for your application. Just because a driver has fixed-point support does not mean it can support the sensor’s full range.
To create generic drivers that support both data types, you should use the dedicated sensor data type:
/* Data type for sensors */
#ifdef CONFIG_SENSORS_USE_B16
typedef b16_t sensor_data_t;
#else
typedef float sensor_data_t;
#endif
Mathematical operations on this type should only be performed using dedicated macros:
sensor_data_ftof(f1)- convert float to sensor data number. Should be used only for compile-time constants.sensor_data_itof(i)- convert int to sensor data number.sensor_data_inv(i)- invert int and convert to sensor data numbersensor_data_add(f1, f2)- add two sensor data numberssensor_data_sub(f1, f2)- subtract two sensor data numberssensor_data_subi(f1, i)- subtract int from sensor data numbersensor_data_mul(f1, f2)- multiply two sensor data numberssensor_data_muli(f1, i)- multiply sensor data with intsensor_data_div(f1, f2)- divide two sensor data numberssensor_data_divi(f1, i)- divide sensor data with intsensor_data_abs(f1)- get absolute value for sensor data numbersensor_data_sqrt(f1)- get sqrt for sensro data numbersensor_data_usat(f1)- unsigned saturation for sensor data.
Code
nuttx/driver/sensor/sensor.c sensor upperhalf implementation
nuttx/driver/sensor/sensor_rpmsg.c sensor rpmsg lowerhalf implementation
nuttx/driver/sensor/usensor.c userspace sensor register implementation
nuttx/include/nuttx/sensors/sensor.h sensor unify structure header file
nuttx/include/nuttx/sensors/ioctl.h sensor ioctl cmd header file
CONFIG_SENSORS open sensor driver config
CONFIG_USENSORS open user sensor driver config
CONFIG_SENSORS_RPMSG open rpmsg sensor driver config
Data Structures
Sensor Types
NuttX defines 50+ types of sensors, covering most physical sensors. All type definitions are located in include/nuttx/uorb.h. If a new type needs to be added, a comment must be provided for the new type, explaining the purpose and units of the sensor.
SENSOR_TYPE_CUSTOM
This is a custom type used for irregular sensor devices where the event structure
changes or is dynamically altered. It is registered using sensor_custom_register.
SENSOR_TYPE_ACCELEROMETER
Accelerometer, used to measure the acceleration vector of the device. Units: m/s=2. Event data structure: (This indicates that there is a specific data structure for accelerometer events, but the actual structure is not provided in the text you gave.)
(won’t introduce them one by one since there are many)
Sensor Topic Definition
The data structure for sensors, which is also the topic structure for uORB, is
defined in include/nuttx/uorb.h.
Lower Half Structure
This structure serves as a bridge between the sensor driver’s upper half and lower half. Both the upper half and lower half populate this structure, with the lower half responsible for synchronizing configuration information and the upper half for exposing data reporting interfaces.
The lower part highlighted in red is filled by the lower half driver, while the rest is filled by the upper half.
type indicates the sensor type: SENSOR_TYPE_XXX
nbuffer specifies the length of the ring buffer in the upper half driver;
ops represents the set of sensor operations implemented by the lower half driver.
push_event and notify_event are not used simultaneously and are filled
by the upper half.
push_event works in conjunction with the ring buffer for the lower half to
report data to the ring buffer;
notify_event is used in conjunction with fetch to notify the upper half that
data is ready when actively
pulling data in a blocking operation.
sensor_lock and sensor_unlock are filled by the upper half and exported
to the lower half to avoid recursive deadlock issues. Currently, they are only
used for sensor_rpmsg.
priv is filled by the upper half and represents the upper context.
persist indicates whether the topic is a notification-type topic.
struct sensor_lowerhalf_s
{
int type;
unsigned long nbuffer;
FAR const struct sensor_ops_s *ops;
union
{
sensor_push_event_t push_event;
sensor_notify_event_t notify_event;
};
CODE void (*sensor_lock)(FAR void * priv);
CODE void (*sensor_unlock)(FAR void * priv);
FAR void *priv;
bool persist;
};
API
The NuttX Sensor UpperHalf Driver provides a set of APIs for the lower half, including registration and timestamp acquisition.
Registration and Deregistration
For the 50+ types of sensors, the sensor_register function can be used to register
a character device. The parameter dev represents the handle of the lower half,
and devno is the index of the device name. If the registration is successful,
a node will be created under /dev/{topic}, for example: /dev/topic/sensor_accel0.
If it fails, an error code will be returned.
For custom special-type drivers, the sensor_custom_register function needs
to be used to register a character device. The parameter dev is the handle of
the lower half, path is the path of the character device, and esize is
the element size of the data reported by the sensor. If the registration is
successful, a character device node will be created at the specified path.
If it fails, an error code will be returned.
int sensor_register(FAR struct sensor_lowerhalf_s *dev, int devno);
void sensor_unregister(FAR struct sensor_lowerhalf_s *dev, int devno);
int sensor_custom_register(FAR struct sensor_lowerhalf_s *dev,
FAR const char *path, unsigned long esize);
void sensor_custom_unregister(FAR struct sensor_lowerhalf_s *dev,
FAR const char *path);
Acquiring Timestamps
The function returns a timestamp with microsecond precision.
static inline uint64_t sensor_get_timestamp(void);
Sensor Driver Operation Set
Sensor driver frameworks for different systems and platforms always revolve around sensor characteristics, and the NuttX Sensor is no exception. For sensors, common operations include: opening/closing, initializing range/resolution/filtering, setting the sampling rate (ODR)/hardware FIFO/operating mode, and interrupt control. Based on practical applications and references from other systems, several key points have been selected to form the sensor operation set. For those without the need for dynamic changes, they can simply be passed as parameters to the initialization function.
Opening/Closing
When the caller invokes open and close, the corresponding open and close in the lower half will be called, with parameters being lower and filep respectively. filep contains user information, so the driver can differentiate between different users. Currently, this interface is only used by the sensor_rpmsg lower half.
CODE int (*open)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep);
CODE int (*close)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep);
Activating/Deactivating the Sensor
When the caller invokes open, if it is a subscriber, it will call activate in the lower half to activate the sensor. When close is called, deactivate is invoked to turn off the sensor.
CODE int (*activate)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep, bool enable);
Setting the Sampling Rate
Applications (including the Sensor service) set the sampling rate of the sensor through the system call ioctl.
Call flow:
ioctl(fd, SNIOC_SET_INTERVAL, &interval)vfs
sensor_ioctl
set_interval().
The sampling interval between consecutive samples of the sensor is set in microseconds. If period_us exceeds the range of min_delay and max_delay, it will be adjusted. When modifying the sampling rate, it should be ensured that the data that has already been prepared is not lost.
CODE int (*batch)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep,
FAR unsigned long *latency_us);
Proactively Pulling Data
To proactively obtain sensor data, set to NULL if using interrupt or polling methods.
CODE int (*fetch)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep,
FAR char *buffer, size_t buflen);
Self-Test
The sensor self-test is mainly used for factory testing and aging purposes.
CODE int (*selftest)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep,
unsigned long arg);
Calibration
Trigger calibration with calibrate and return calibration data to arg. Use set_calibvalue to set calibration data to the underlying sensor.
CODE int (*calibrate)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep,
unsigned long arg);
CODE int (*set_calibvalue)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep,
unsigned long arg);
Sensor Information
Use get_info to proactively obtain sensor information data, with the return value
being sensor_device_info_s.
struct sensor_device_info_s
{
uint32_t version;
sensor_data_t power;
sensor_data_t max_range;
sensor_data_t resolution;
int32_t min_delay;
int32_t max_delay;
uint32_t fifo_reserved_event_count;
uint32_t fifo_max_event_count;
char name[SENSOR_INFO_NAME_SIZE];
char vendor[SENSOR_INFO_NAME_SIZE];
};
CODE int (*get_info)(FAR struct sensor_lowerhalf_s *lower,
FAR struct file *filep,
FAR struct sensor_device_info_s *info);
Custom Control
In addition to the above controls, if certain sensor control requirements are still not met, the control command with custom controls can be used.
Call flow:
ioctl(fd, custom macro cmd, custom parameters)vfs
sensor_ioctl
control().
CODE int (*control)(FAR struct file *filep,
FAR struct sensor_lowerhalf_s *lower,
int cmd, unsigned long arg);
Downsampling
The downsampling capability of Vela Sensor is provided by the sensor upper half at the driver layer, supporting both aligned and unaligned downsampling mechanisms. When the publisher pushes the main line index each time, the subscriber retrieves data from its own index. If the difference between the two indexes exceeds the length of the internal queue, data will be lost. Otherwise, the next theoretical data point is calculated based on the subscription frequency, the publication frequency factor, and the current index.
Multi-Core Mechanism
The cross-core capability of Vela Sensor is provided by the sensor rpmsg lower half at the driver layer, which is primarily responsible for sending or receiving subscription and broadcast messages from other cores.
Publishing Topics
When a local application publishes a topic for the first time, it broadcasts the message to all cores. If there are subscriptions on other cores, they bind with each other. A stub is created locally to represent the subscription on a remote core, and a proxy is created on the remote core to represent the local publisher. All subsequent communication between them is determined by the context of the stub and proxy.
Subscribing to Topics
When a local application subscribes to a topic for the first time, if the message is broadcast to all cores and there are publishers on other cores, they bind with each other and communicate through stubs and proxies.
Remote Control
When a local subscriber modifies the sampling rate and the publisher of that topic is remote, the local proxy will publish this sampling rate to the remote stub. Upon receiving this control information, the stub sets it for the actual physical hardware. The same applies to other controls.
Remote Message Publishing
When local data is published, the sensor rpmsg lower half collects all messages within a sampling interval that does not exceed half of the fastest topic’s interval and sends them to other cores together, reducing IPC occurrences and saving power consumption.
Subscription and Publication Order
There is no order restriction for advertising and subscribing to topics. For notification-type topics, even if the advertisement is canceled immediately after data publication, other cores can still successfully obtain the latest data. For general-purpose topics, subscribing after publication will only allow reading of data published after the subscription.
Programming Modes
NuttX Sensor drivers support three data retrieval methods: proactive, interrupt-driven, and polling. The proactive method allows filling sensor events using a buffer passed in by the app, reducing memory copy operations. The interrupt-driven and polling methods open an internal circular buffer, where each event is automatically pushed upon generation. The size of the buffer is set by sensor_lowerhalf_s::buffer_size. For sensors with high sampling rates, it is recommended to set the buffer size for 2-3 events, while for sensors with low sampling rates, setting it for 1 event is sufficient.
Proactive Retrieval
This method is recommended for sensors with low sampling rates and small data
volumes. The sensor_ops_s::fetch function must be implemented.
The call flow is:
read(fd, buf, len)vfs
sensor_read
fetch()
It is not advisable to use the fetch method to retrieve sensor data. When the caller invokes read, accessing the bus to obtain data has two disadvantages: the bus speed is low, which may block the upper layer; and the retrieved data may be old and not representative of the current state.
When using the fetch function, the upper layer will automatically disable the circular buffer and can directly use the user-space buffer to store register data, reducing memory copy operations. When the character device node is opened in non-blocking mode, the fetch operation will directly read the registers via the I2C/SPI bus, and the poll operation will always succeed. When opened in blocking mode, if there is no ready data when read is called, the poll function can be used to monitor it. If a POLLIN event occurs, the read function should be called immediately to retrieve the data.
Interrupt-Driven Retrieval
For sensors with hardware interrupts, sensor data can be read via the bus in
the interrupt’s bottom half, and the event can be pushed to the upper layer’s
circular buffer using sensor_lowerhalf_s::push_event. When using the internal
circular buffer, data generated in each interrupt’s bottom half is pushed to
the upper layer’s circular buffer. Upper-layer applications read data directly
from the buffer. When the buffer has no data, it will depend on the blocking
flag in f_oflags to determine whether to wait. Common sensors operate in
interrupt mode. When an interrupt occurs, a worker is scheduled to start
the bottom half, which then retrieves sensor data via buses such as
I2C or SPI and calls the push_event interface to push the data to the upper
half’s buffer. It is recommended to configure an interrupt pin for sensors
with a sampling rate higher than 25Hz.
Polling Retrieval
For sensors without hardware interrupts, data generated by the sensor can be collected through periodic polling, with the polling period typically varying based on the sampling rate.